

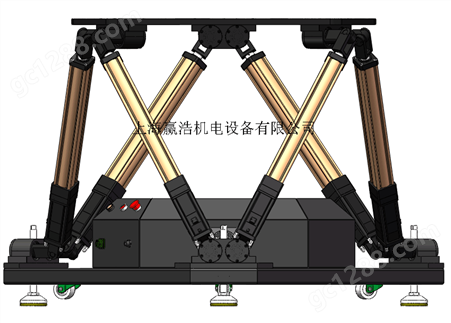
六自由度平台 运动能力指标
| 名称 | P-030六自由度运动平台运动性能指标 | |||||
| 主要技术指标 | (1)有效载荷:350kg,总载荷:500kg(含平台自重)。 | |||||
| (2)运动参数: | ||||||
| 姿态 | 位移 | 速度 | 加速度 | 定位 精度 | 重复定 位精度 | |
| 俯仰(α) | ±18° | ±40°/s | ±80°/s2 | 0.1° | 0.05° | |
| 滚转(β) | ±18° | ±40°/s | ±80°/s2 | 0.1° | 0.05° | |
| 偏航(γ) | ±20° | ±40°/s | ±80°/s2 | 0.1° | 0.05° | |
| 垂直升降(z) | ±140mm | ±600mm/s | 6m/s2 | 1.0mm | 0.1mm | |
| 纵向位移(y) | ±180mm | ±600mm/s | 6m/s2 | 1.0mm | 0.1mm | |
| 侧向位移(x) | ±180mm | ±600mm/s | 6m/s2 | 1.0mm | 0.1mm | |
| 其他 技术指标 | (1)系统响应频率:0.0HZ~20HZ。 | |||||
| (2)行程回差:≤0.2mm。 | ||||||
| (3)漂移量:平台系统连续运行12h以上,任何一个电动缸的位置漂移不超过0.00025m。 | ||||||
| (4)平台总重:300kg | ||||||
| 使用寿命 | 额定载荷下,全行程往复工作寿命不小于1×107次,存储寿命不小于48个月。 | |||||
自研集成式运动控制器特点:
1、全数字微型控制器:采用高速微控芯片;
2、以太网接口,232串口:与监控计算机进行通信;
3、Can0pen总线接口:与伺服驱动器进行通信;
4、数字输入、输出接口:采集或者输出数字IO信号。
5、上,下位机通讯采用UDP/IP协议,数据刷新率100HZ,硬件传输速度为100Mbps。








所有评论仅代表网友意见,与本站立场无关。