


空中自行车道三维建模钢结构测量
厦门空中自行车道示范段(BRT洪文站——BRT县后站)2016年09月14日开工建设。2017年01月20日工程完成竣工。起点BRT洪文站,终点BRT县后站,全长约7.6公里。空中自行车道是条、世界的空中自行车道,已于2017年01月26日试运行,开放时间为每天06:30-22:30,禁止行人和电动车进入。根据测量要求,在卫星地图上定位需要扫描路段进行线路规划,假设架站位置点的数目,以此估算出此次测量需要的工作时间。根据测量要求,在卫星地图上定位需要扫描路段进行线路规划,假设架站位置点的数目,以此估算出此次测量需要的工作时间。

上图:项目路线图
抵达施工现场,对需要测量物体进行环境评估,观察整体建筑物的轮廓走向以及周边环境对扫描过程的影响,在保证人员与仪器安全情况下选择较为空阔且对被测物体较少遮挡的位置进行摆设站点扫描。

站点布置如下俯视图所示(白色:桥体,红色:架站点),从需要测量的位置定为起点开始以至少三站为一列延着结构走向往结束段摆设站点,测量路段总长度约为1KM,站点间距为15m~20m之间,单站扫描时间为2分09秒钟(此次扫描均无拍照)。周边房屋建筑可作为数据拼接时的参照物,可设站扫描,便于后期处理。

 分叉口应将站点摆设至能覆盖岔道口的位置,并且双车道之间需单独设站,以确保数据的完整性。同时,遮挡严重的范围可根据情况设立多个站点
分叉口应将站点摆设至能覆盖岔道口的位置,并且双车道之间需单独设站,以确保数据的完整性。同时,遮挡严重的范围可根据情况设立多个站点
周边房屋建筑可作为数据拼接时的参照物,可设站扫描,便于后期处理。

上图:结合施工现场实际情况,可根据地形对架站点位置进行调整,便于更好地扫描

上图:现场照片
数据预处理
数据拼接
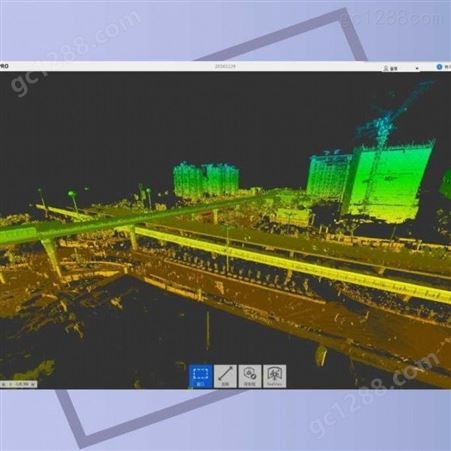
将原始数据导入进scene软件进行操作
 基于俯视图的拼接是SCENE用于多数注册流程的通用工具。它不需要目标,而且能够较快地拼接大型扫描项目,如果倾角仪数据可用,则基于俯视图的注册与初始扫描仪位置无关。如果扫描没有倾角仪数据,则使用其当前的总体位置来确定z轴。
基于俯视图的拼接是SCENE用于多数注册流程的通用工具。它不需要目标,而且能够较快地拼接大型扫描项目,如果倾角仪数据可用,则基于俯视图的注册与初始扫描仪位置无关。如果扫描没有倾角仪数据,则使用其当前的总体位置来确定z轴。

通过基于俯视图拼接,将散乱的站点拼接到一定范围内,此步骤为初次拼接

 二次拼接则采用云际拼接,使用云对云注册的前提条件是扫描站直接的大致位置相近,例如使用对应视图、基于俯视图的拼接或在基于传感器数据(GPS,罗盘)的拼接之后,通过两种拼接手段,将多站数据拼接在一块。
二次拼接则采用云际拼接,使用云对云注册的前提条件是扫描站直接的大致位置相近,例如使用对应视图、基于俯视图的拼接或在基于传感器数据(GPS,罗盘)的拼接之后,通过两种拼接手段,将多站数据拼接在一块。

拼接整体平均值较为理想,站与站之间的平均误差为0.0019m

优化数据
 激光点云扫描是进行了数百万次测量的结果,正如任何其他测量一样,它达到了多种不同等级的精度。不可能真正做出准确的物理测量,对于不同物体不同环境都可能对扫描的精度造成影响。例如激光光束扫描到空气中的灰尘或颗粒,反射回来,即使打开的仪器的Clear Contour和Clear Sky过滤器,也不可能*的删除这些噪点。所以还需要手动的通过软件进行删除, 优化采取预处理扫描。
激光点云扫描是进行了数百万次测量的结果,正如任何其他测量一样,它达到了多种不同等级的精度。不可能真正做出准确的物理测量,对于不同物体不同环境都可能对扫描的精度造成影响。例如激光光束扫描到空气中的灰尘或颗粒,反射回来,即使打开的仪器的Clear Contour和Clear Sky过滤器,也不可能*的删除这些噪点。所以还需要手动的通过软件进行删除, 优化采取预处理扫描。
预处理扫描只能小范围的剔除噪点,还需手动进行创建裁剪框进行删除

导出数据
 因后期需要导入进autodesk软件中进行后处理,需将拼接好的文件进行格式转换,所以导出的文件应当选择PTS文件,只有这个格式才能导入RECAP软件中转换。
因后期需要导入进autodesk软件中进行后处理,需将拼接好的文件进行格式转换,所以导出的文件应当选择PTS文件,只有这个格式才能导入RECAP软件中转换。
格式转换
利用RECAP将导出的PTS文件进行转换。

经过格式转换后将文件保存为RCP格式

保存的RCP文件则可用于作图与建模
数据后处理及展示数据加工处理
利用3DMax进行三维建模(必须是3DMax2015版本以上带有PointCloud功能才能进行导入点云文件),将已经处理好的RCP文件导入进3DMax。

创建裁剪框将需要显示的部分进行框选

打开捕捉工具对点云的边界点进行捕捉,通过模型的自由编辑调节出标准的轮廓外形。

得到一个未赋予材质的模型(俗称白模):

对模型赋予材质,根据实地拍照取景,获取出现场张片在Photoshop软件中对图片进行调整, 调整后的图片则能加载进3DMAX材质编辑器中进行利用:


将编辑好的材质赋予到相应的模型面上:


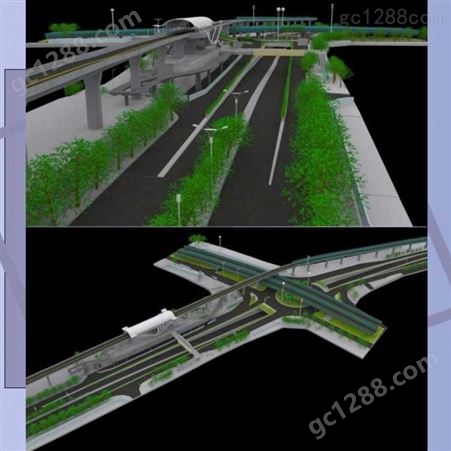
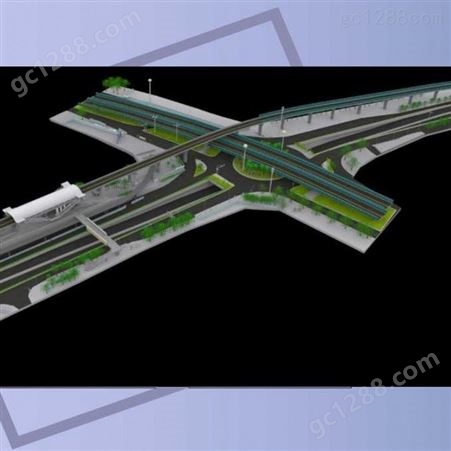
将整体模型赋予材质后则完成了一个模型的完整制作:
钢箱梁点云与设计模型进行对比,首先将设计模型导入3DMAX进行切片处理:

截取出立面,得到设计模型的立面文件存储为DXF 格式:

再将钢箱梁的点云数据进行立面截取,保存为RCP 文件:

将两个文件导入CAD进行比较(白色为点云,红色为模型)。下图为多段数据对比:

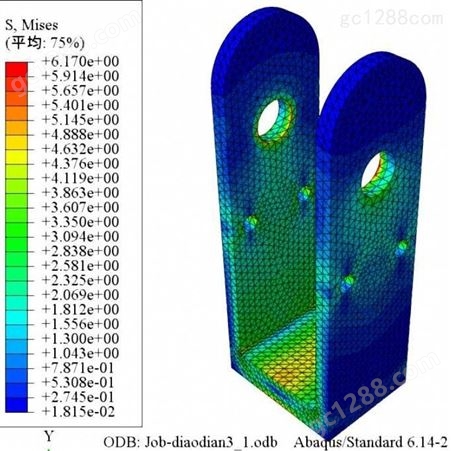
 误差分析
误差分析
从误差理论来分析,扫描系统测量误差可分为系统误差和偶然误差。系统误差引起三维激光扫描点的坐标偏差,可通过公式改正或修正系统予以消除或减小。测量系统的偶然性误差是一些随机性误差的综合体现。 三维激光测量误差的影响因素较多,大致可分为三类:仪器误差、与目标物体反射面有关的误差、外界环境条件。仪器误差是仪器本身性能缺陷造成的测量误差,包括激光测距的误差、扫描角度测量的误差;与目标物体反射面有关的误差主要是目标物体表面粗糙度的影响;外界环境条件主要包括温度、气压等因素。
成果展示
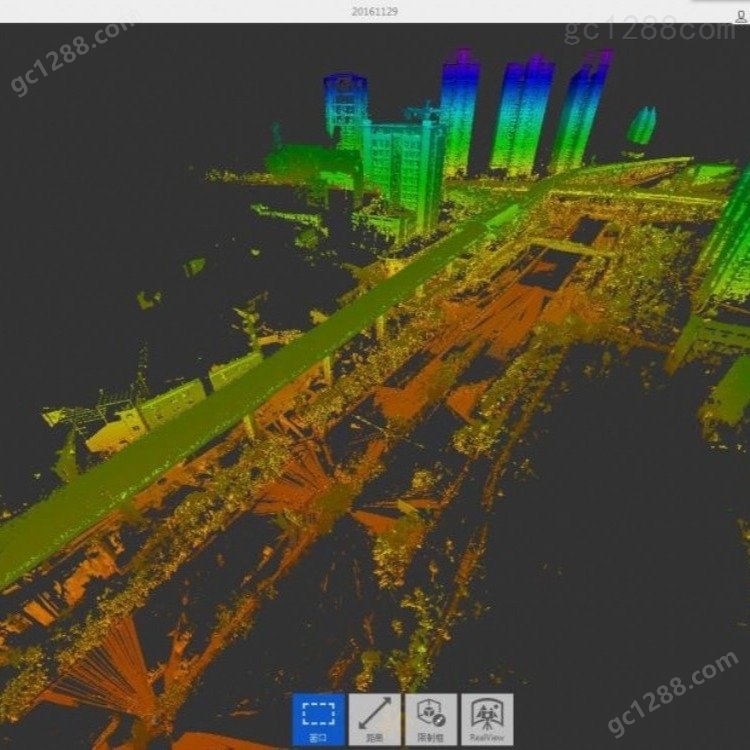
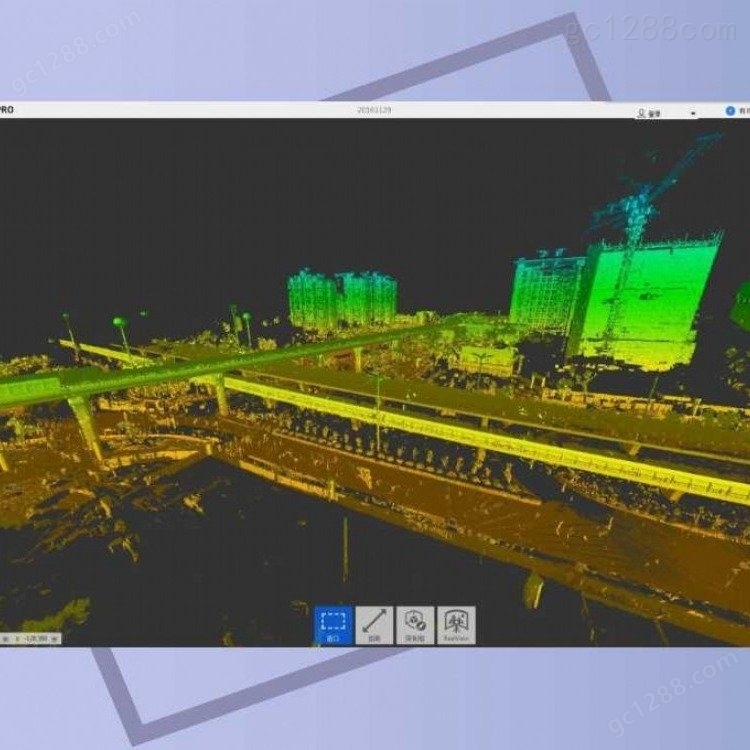
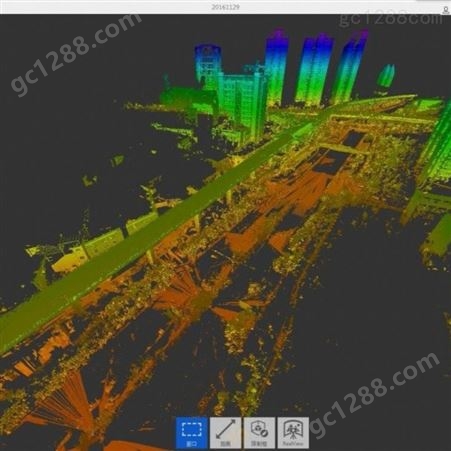
点云数据显示截图




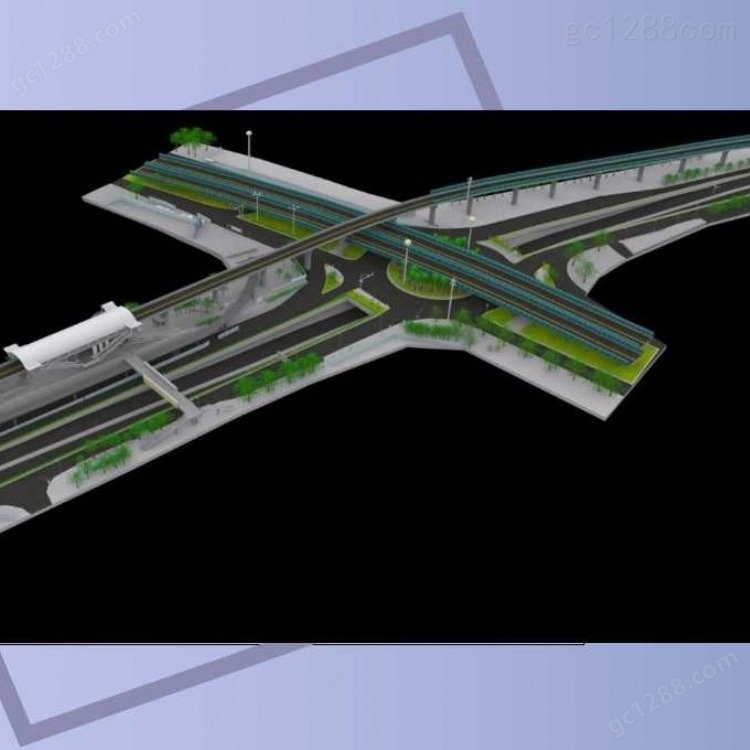
三维模型显示截图:





| 形展测量技术(上海)有限公司销售及其售后服务网络 | |||||
| 扫描微信直接技术和业务沟通 | ||||
华东地区 | (蒋女士) | ||||
| 华中地区 | (朱先生) | ||||
| 华北东北 | (刁女士) | ||||
| 西南华南 | (倪小姐) | ||||









所有评论仅代表网友意见,与本站立场无关。