




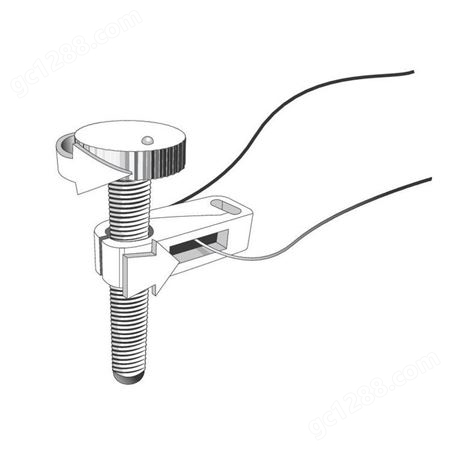
闭环 Picomotor 促动器是需要闭环控制和位置校准的应用的理想之选。此款设备配有集成旋转编码器以及正向和反向限位开关,提供了标准 Picomotor 促动器的属性,并具有的精度和重复性的附加优点。
内置旋转编码器以用于闭环操作
定位分辨率<30 nm
一次设置的长期稳定性
轴向载重能力为 22 N
简单集成
易于使用

选择在闭环模式下操作闭环 Picomotor 促动器使其保持在设定位置,或命令它运动一段的距离。您还可以选择在特定位置之间进行移动,或以一定的速率移动。无论哪种方式,当促动器到达其目标位置时,控制器都会将电机调整到所需的编码器计数,然后停止运动。即使您保持启用伺服回路,电机也只会对导致螺钉旋转的系统干扰做出响应而移动。由于电机的固有分辨率比编码器的分辨率更精细,因此始终可以实现零计数编码器误差。您可以随时查询编码器以确定螺钉的旋转情况。
定位分辨率<30 nm
该闭环 Picomotor 促动器在开环模式下可以实现一个步长小于 30nm,即允许非常小的位移。在闭环模式下,编码器的分辨率为 nm,允许非常小、受控且可重复的运动。
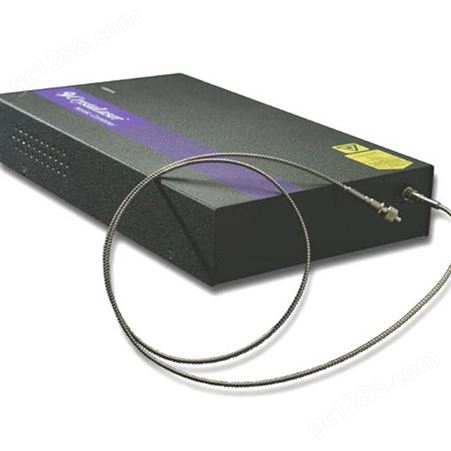
易于使用的灵活运动控制器和驱动器
我们的闭环 Picomotor 控制器和驱动器是模块化的。您可以一次性菊链多达 31 个的驱动器,而每一个驱动器具有两个通道,因此您能拥有一个连有多达 62 个闭环促动器的网络。控制器系统有两种接口选项:手持控制面板或计算机,两种选项均可即插即用。
Picomotor 技术的技术
Picomotor 促动器依靠动静摩擦之间的基本差异来工作。这里可以拿魔术师的“桌布戏法"举例:快速拉动桌布(低动摩擦)会使餐具留在桌子上,而慢速拉动(高静摩擦)会将餐具从桌子上拉下来并搞得乱七八糟!我们的 Picomotor 促动器将相同的原理用于螺纹钳口,类似于对开螺母的两半,夹在的 80 螺距螺钉周围。一个钳口连接到压电换能器的一端,另一个钳口连接到换能器的另一端。在压电模块上施加一个缓慢电信号,该信号可缓慢的改变压电模块的长度,而长度的改变使得两个钳口沿相反方向滑动。这种缓慢的滑动运动使螺钉转动(静摩擦)。在换能器运动结束时,一个快速电信号快速地将钳口返回到其起始位置。由于螺钉的惯性和低动摩擦,它将在其原位置保持不动。只需反转快慢信号的顺序即可反转旋转方向。









所有评论仅代表网友意见,与本站立场无关。